 218
218
 0
0
 2023-07-29
2023-07-29
 2023-07-29
2023-07-29
由中国人工智能学会、福州新区管理委员会、福建省大数据集团有限公司主办,福建省大数据产业商会承办,中国科学技术学会指导的 2023中国人工智能大会(ccai 2023)于2023年7月22-23日在福州数字中国会展中心举办。
2023年7月22日下午,在ccai 2023多模感知交互专题论坛上,华中科技大学人工智能与自动化学院副院长、国家杰青获得者张海涛教授作“自主无人艇集群协同围捕理论技术及应用”的专题报告。张教授通过分享自身团队在该主题下获得的研究成果,进行了详细的汇报:(1)意图识别;(2)对变速目标的固定构型围捕;(3)对变速目标的异构构型围捕;(4)对多变速目标的协同围捕;(5)方位约束的研究;(6)基于高维引导向量场的围捕控制;(7)集群攻防博弈。

图一 报告主题——自主无人艇集群协同围捕理论技术及应用
报告开始,张海涛教授介绍了群体智能具有多学科的交叉特性,从微观的原子到宏观的行星尺度的物理系统都是带有无序和涨落的相互作用。张教授指出当前的前沿问题是如何通过简单个体的智能和互动涌现出高度协调的群体行为。如当前的大模型gpt为例,一百亿个参数可以解决大部分的问题,但仍有不能解决的问题,通过结合群体智能和机器性能可以解决快速增长的人类难题。

图二 研究背景
紧接着,张海涛教授介绍了其研究课题的立项背景,提出了因为海域资源的环境复杂险峻,海上风浪流涌,险滩港汊,障碍物随时突现的情况下,需要以突变式快速应对随时出现的形势。如港中跨海通道为例,海上有桥路,海面有桥体桥墩,海底有跨海电缆,在这种复杂环境下执行特殊任务,如缉私、国防和海域探测等任务时,无人艇-无人机的跨域协同可以更高效地完成任务。

图三 立项背景
接下来张教授又介绍了其围捕控制的研究路线。从2016年开始研究的单目标围捕到2018年的静态多目标和2020年的动态多目标的围捕,再到2021年研究的跨域-异构的构型围捕,一直取得了不错的成果,张教授表示其课题组目前正在研究集群博弈。张教授指出,在缉私等任务的围捕过程中,对方也在学习围捕者的行为,以突破围捕,故如何做到“魔高一尺,道高一丈”,把对方一直压制住,是现在大家最感兴趣的问题之一。

图四 围捕控制的研究路线
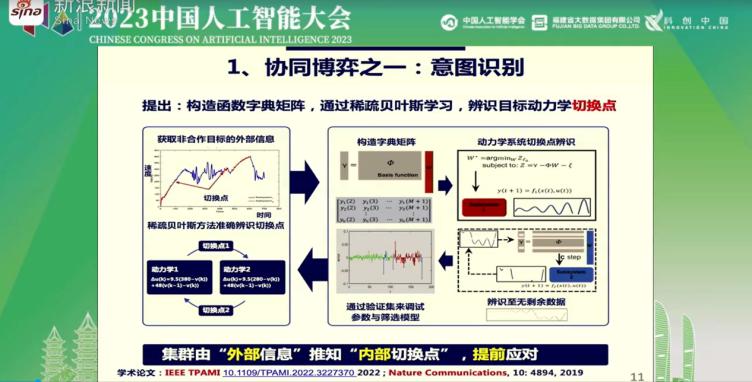
基于此研究背景,张海涛教授提出了此类问题的一系列凯发k8官网下载客户端的解决方案,并且在汇报中给与与会人展示。首先,张教授提出了在无人艇和无人机在围捕过程中,出现的动力学切换点判断问题,即意图识别。在无人艇、无人机运动过程中,难免会出现传感器或制动元件损坏的情况发生,而往往在围捕的过程中,不能因为某个个体出现问题而中止,那么应在非主要传感器或者制动元件损坏后,切换其动力学的控制算法,使其可以继续参与围捕。并且在围捕过程中从进攻到防御,或者从防御到进攻,都需要有一个切换,而往往围捕过程中,这类切换是基于外部信息,即被围捕者的情况去做出判断的,故张教授团队为此提出了一个名为 ihyde的算法,实现了对动力学控制系统的转换。
ihyde算法首先为外部的物理信息构造出一个函数字典矩阵,然后通过稀疏贝叶斯的学习方法识别动力学切换点。具体成果已发表在了tpami和nature communications上,论文题目为《data driven discovery of cyber physical systems》。
图五 意图识别
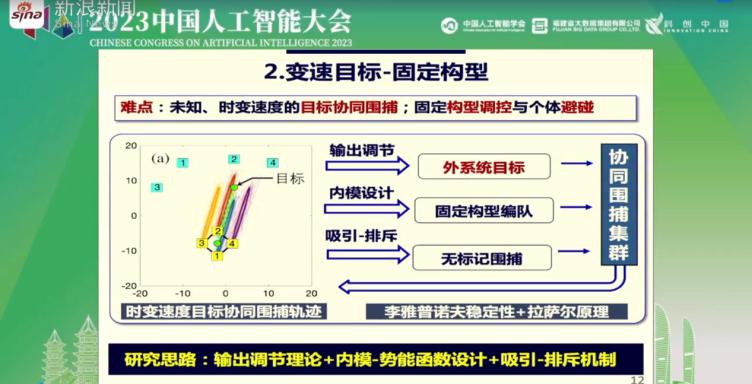
接着,张教授讲解了对于变速目标的固定构型的围捕采用的方案。对于移动的目标,未来位置未知的目标,采用了输出调节的方法对变速目标进行预测。而为了将目标包围在多架无人艇中,采用了一种二阶的无标记控制器,在该控制器中,通过位置信息的反馈,驱使无人艇向目标移动,以及无人艇之间的排斥。在有标记的围捕方案中,必须预先为智能体设置好标记,即目标位置点,任务过程中智能体逐渐移动到该标记点。但是采用有标记的围捕方案时,当某一智能体崩溃时,将无法形成一个围捕队形,所以在张教授的方案中,没有预先为无人艇设置标记,让无人艇在移动过程中系统地考虑编队演变。从而实现保持一个刚性无碰撞的队形协同围捕一个变速目标。
图六 对变速目标的固定构型围捕
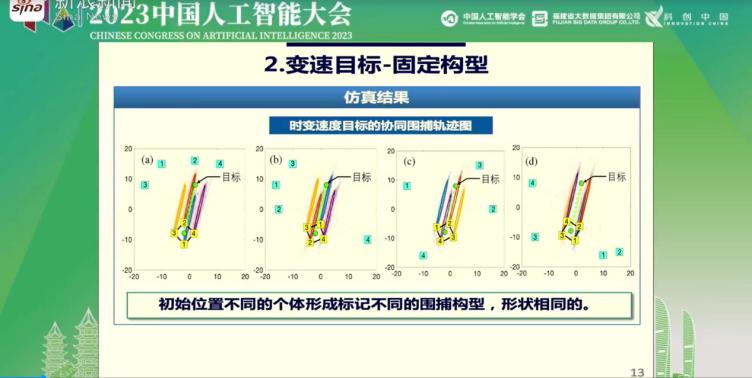
下图中蓝色点为无人艇的初始位置,黄色点为无人艇最终位置,绿点为围捕目标,无论初始队形如何,最终队形仍能保持菱形的编队,并且各无人艇最终位置不固定。做到了一个弹性的打标。该成果发表在automatica,论文题目为《cooperative label-free moving target fencing for second-order multi-agent systems with rigid formation》。
图七 变速目标-固定构型的仿真结果
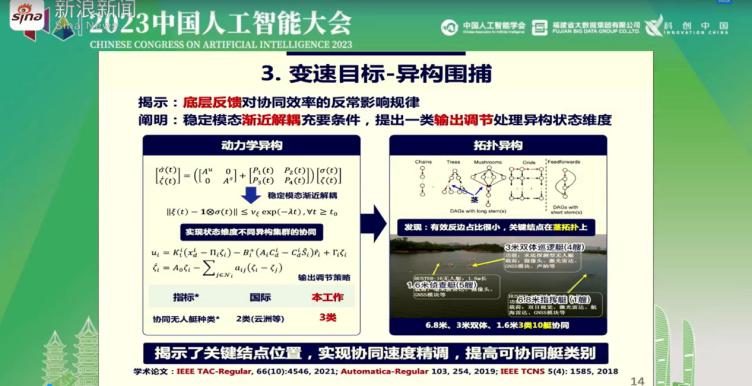
在同构构型的基础上,张教授又提出了异构构型的围捕方案。所谓的异构就是动力学控制系统不相同的情况下的多智能体的协同控制,在张教授的研究中为三种无人艇和两种无人机的异构。在智能体种类增加的情况下,控制、接口和通讯等方面的协同难度会呈指数级地增加。在文章《necessary and sufficient conditions for asymptotic decoupling of stable modes in ltv systems》中,分析了线性时变系统的基本特性,利用了矩阵指数和状态转移矩阵,提出了渐进解耦的充要条件。在该异构的构型中,依赖了该文中的稳态渐进解耦的充要条件,实现了异构的动力学同步。而在多智能体的拓扑异构情况下,张教授还提出在连接点增加的情况下,从底层到顶层的反馈中,只有0.5%是起作用的以下,并且通过上文中的方法找到少数关键点所在的茎拓扑,实现协同速度的精调,以提高可协同智能体的类别。
图八 变速目标-异构构型围捕
下图为异构围捕的展示,共十架无人艇和两架无人机,实现了三维的围捕。张教授表示其团队最多可以做到四十台无人艇,十架无人机的异构围捕。
图九 异构围捕的展示
接下来,张教授讲解了对多变速目标围捕实现。借鉴了自然界捕食者捕猎的的规律,围捕者只需要对被围捕者的部分个体定位即可,然后通过被部分感知的目标估计出多目标的中心,实施基于目标中心的围捕,从而达到对多目标的围捕行动。并且通过实验证明该方案可以实现对多变速目标的有效围捕。
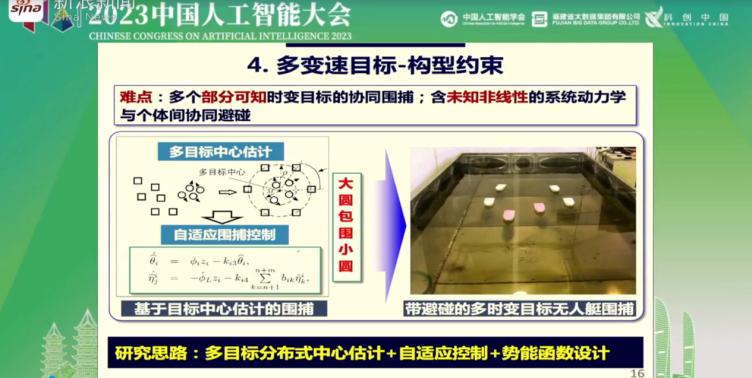
图十 多变速目标的构型约束
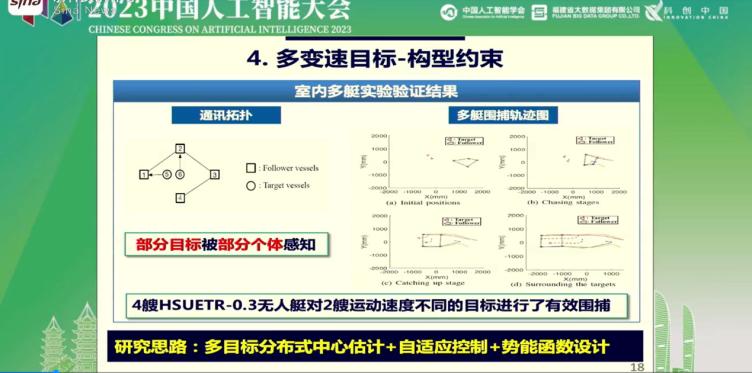
图十一 多艇验证的实验结果
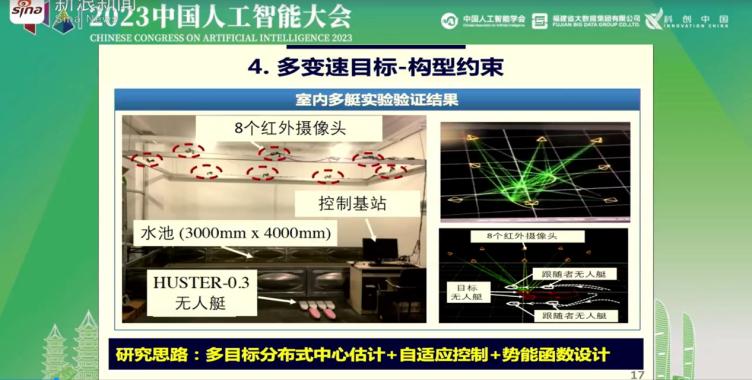
图十二 实验环境
张教授指出,在实际作业中,常出现舵机被水草卡死的现象,导致无人艇失去控制,螺旋移动。而在其发表的《fault-tolerant control of autonomous surface vessels subject to steer jamming for harbor returning》中,提出了一种机动方向容错控制的方法,通过根据无人艇的螺旋移动轨迹调节制动器的输出功率,从而保证了在任何方向上前进的可能性,让无人艇在舵机卡死的情况下仍然可以螺旋前进,到达目的地。并且通过实验验证了该方法的可行性。
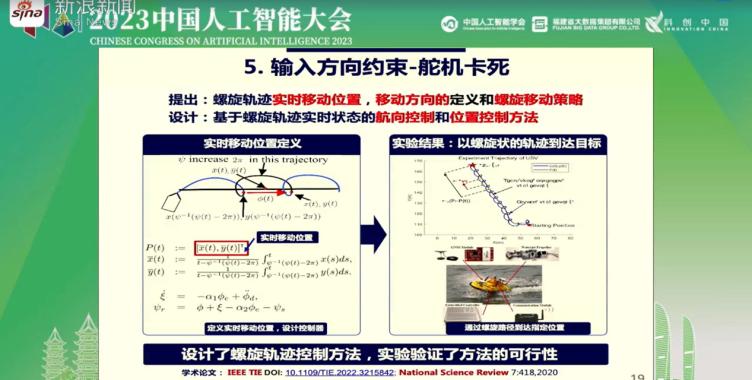
图十三 输入方向约束
在协同围捕过程,感知目标和协同智能体位置信息在目前的研究中大部分使用的是激光测距雷达,对周边环境进行建模,从而识别各物体位置。而激光测距雷达价格昂贵,如何做到使用低廉的方法代替激光测距雷达成为了一个热门的研究课题。
张教授团队对于这个问题给出了一个答案,提出了一种基于纯方位的分布式控制器,该控制器由三项组成,即逼近目标状态的纯方位估计项,完成围捕目标任务的上层包围项和跟踪上层信号的单艇调节项,使得无人艇在仅使用角度传感器的情况下,通过数学方法计算出目标位置,做到目标方位的估计,并且能完成无碰撞的围捕任务。其中只需要测出目标与自身的角度值、自身与邻居结点的角度值以及自身的航向角,通过持续激励等方法,去估测出个体与目标的相对距离,做到了激光测距雷达实现的功能。
最后,张教授团队使用三艘huster-0.3和一艘目标艇组成的实验平台对该方法进行实验,并且证明了该方法的有效性。具体成果发表在ieee transactions on industrial electronics上,论文题目为《bearing-only motional target-surrounding control for multiple unmanned surface vessels》。
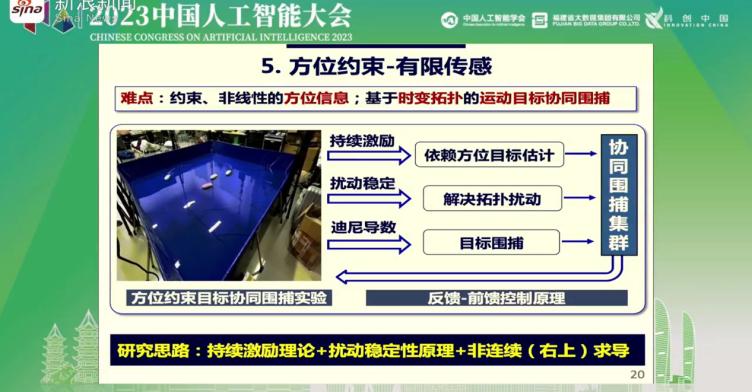
图十四 方位约束
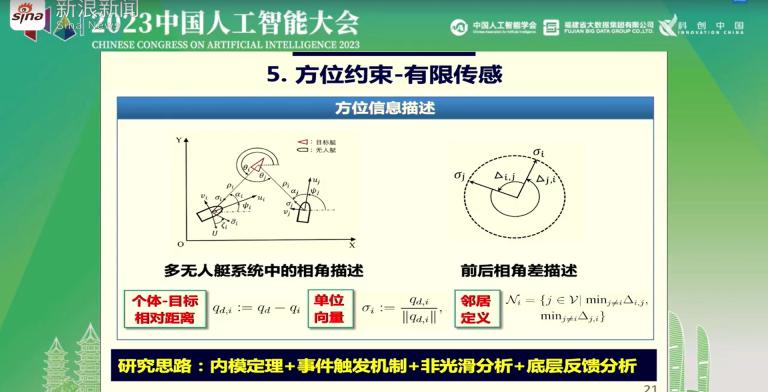
图十四 方位信息描述
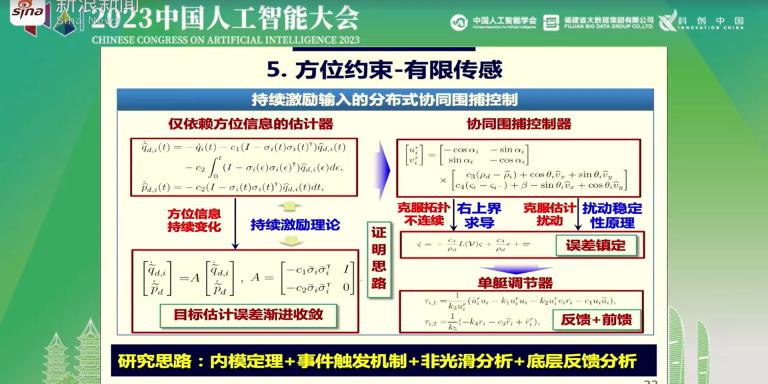
图十五 基于方位估计的控制器原理
除此之外,张教授还提到了,在无人船编队沿着一些特殊路径航行时,如圆和李萨如图,会出现奇异点,导致队伍不能按期望航行,部分个体可能会出现抄近路或者偏离航线。以此为研究方向,张教授提出在二维的运动平面上引入一个虚拟坐标,将其映射到三维的空间里消除奇异点。这样就可以让原本封闭且自相交的期望路径变成一个非自相交的期望路径,保证了全局收敛性。并且在相邻结点之间仅传输虚拟坐标的信息,减少了通讯成本,并在实验中得到了证明。该研究成果发表在期刊ieee transactions on robotics的文章《spontaneous-ordering platoon control for multirobot path navigation using guiding vector fields》上。
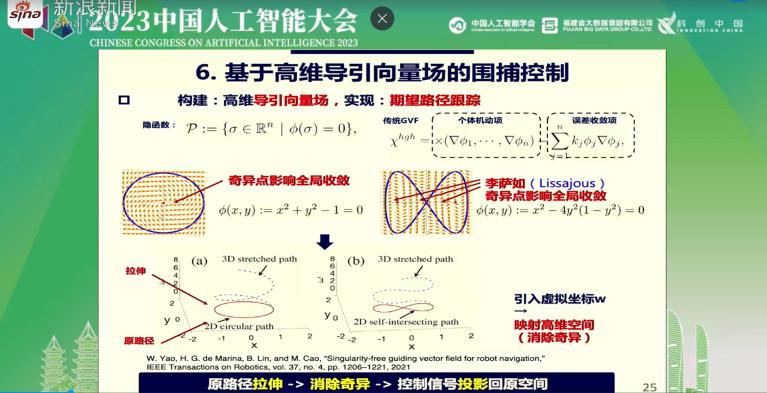
图十六 基于高维引导向量场的围捕控制
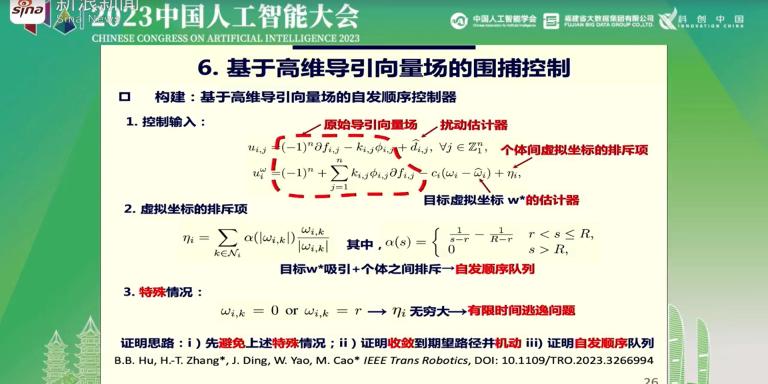
图十七 基于高维引导向量场的围捕控制的原理
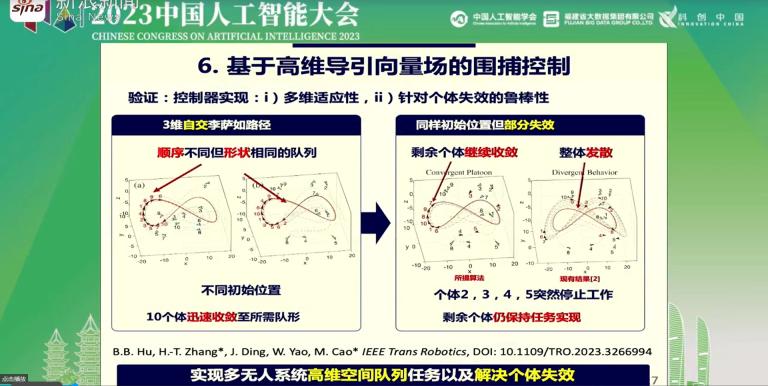
图十八 基于高维引导向量场的围捕控制仿真实验

图十九 基于高维引导向量场的围捕控制实验
最后,张教授展示了其与广州海关共同研究的集群攻防博弈,期望未来可以应用在缉私任务上。这个方向也是群体智能里的一个热门方向,需要做到不断在博弈中学习,以做到压制对方。

图二十 集群攻防博弈
在报告的最后,张教授为我们介绍了华中科技大学位于广东东莞松山湖的1.2万亩的无人艇基地、与广船国际合作的2万亩的龙穴港区海测基地以及与云洲智能合作的万山海测基地,华中科技大学自主无人艇研发中心已经自主研发出了七种型号的无人艇。
在工程落地方面,张教授团队与广船国际合作完成了深中通道的沉管隧道的施工,在以往,大多用的是半潜船和蛙人来做,因为误差需要控制在6毫米以内,经常以失败告终,张教授采用了多无人艇的协同来进行作业之后,成功率大大提高,增加了施工的效率。张教授为我们展示了其团队研发的水下移动装备“海豹”。

图二十一 华中科技大学无人艇研发基地
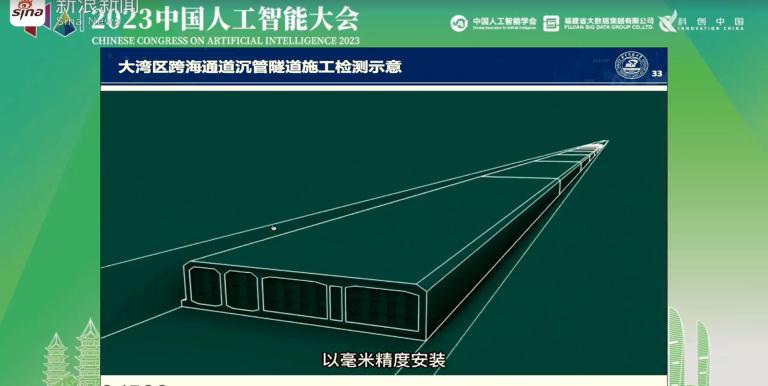
图二十二 工程落地项目示意图

图二十三 机械“海豹”示意图
张教授在最后提出了对未来的展望,提出无人系统未来的三大趋势,分别是自主化、智能化和集群化。无人系统就目前来看仍处于半自主控制,希望未来可以做到全自主控制,并且协同控制要从突发式协同向对抗博弈下的协同发展,并提出了空天-水面-水下-基站协同社群的构想。

图二十四 未来展望
张海滔,华中科技大学人工智能与自动化学院副院长、教授、博导、国家杰出青年基金获得者、自主智能无人系统教育部工程中心主任。2005年在中国科技大学获得博士学位,2007年在英国剑桥大学从事博士后研究,2010年晋升为教授,同年被评为博士生导师。从事群体智能、自主无人艇集群协同、多机器人协同制造等领域研究,主持国家自然科学基金联合重点(两项)、jkw重点项目等国家级项目十余项。发表sci论文118篇,其中在nature machine intelligence、nature communications、national science review、automatica以及ieee汇刊发表论文68篇,出版springer英文专著2部。授权发明专利32件,制定国家标准1件,成果在中船重工、广船国际等转化,应用于国家大型海洋设施检测、南海油气资源勘测等。理论成果被nature physics研究亮点报道、应用成果分别被国防部和国务院凯发k8官网下载客户端官网报道。牵头获湖北省自然科学一等奖2项、广东省技术发明一等奖1项。担任/曾任ieee trans. systems, man, and cybernetics-systems、ieee trans. circuits and systems ii、中国工程院院刊engineering、《控制理论与应用》、《机器人》等刊编委或青年编委。






