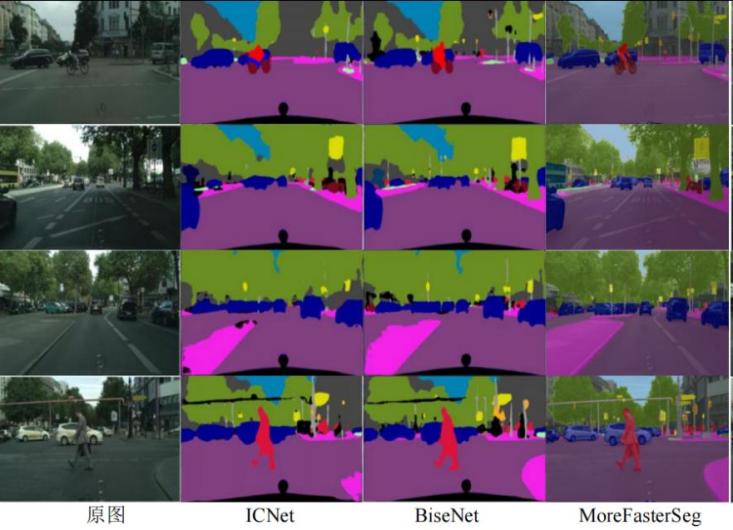
(1)an efficient semantic segmentation network based on neural architecture search
针对移动机器人导航系统对复杂场景理解的高性能需求,提出了一种鲁棒快速语义分割网络,在公开的室外环境数据集上进行了对比评估实验,方法具有良好的鲁棒性,不仅有效提升目标物体的语义分割精度,而且取得良好的实时性。研究成果对提升移动机器人系统对复杂室外环境的理解能力具有实际应用价值,研究成果“an efficient semantic segmentation network based on neural architecture search”2022年发表在eaai期 刊上(中科院一区,if=7.802)。
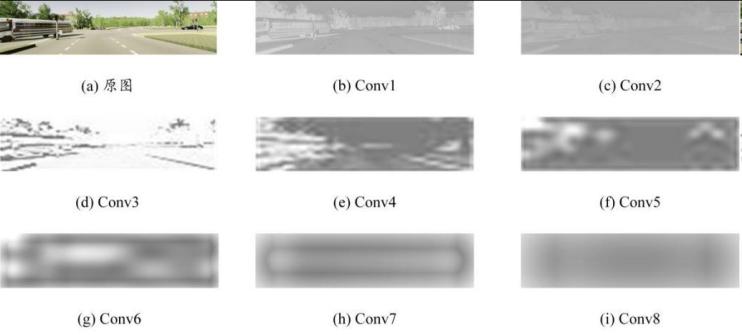
(2)learning invariant semantic representation for long-term robust visual localization
针对移动机器人长期导航面临复杂环境中变化因素的挑战问题,提出学习型不变语义描述符并将其应用于语义定位,并在多个公开的数据集上对方法的性能进行了验证,数据集包括不同的天气、植被情况、区域和光照条件,实验证明了方法在复杂环境中视觉定位性能优于目前代表性的sota方法,这一研究进展对增强机器人对变化环境的自适应能力具有良好的实用价值,研究成果“learning invariant semantic representation for long-term robust visual localization”2022年发表在eaai期刊上(中科院一区,if=7.802)。
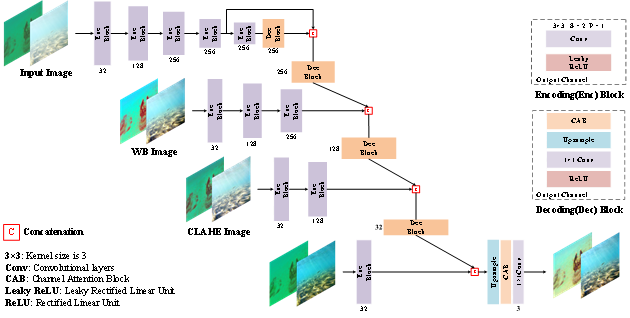
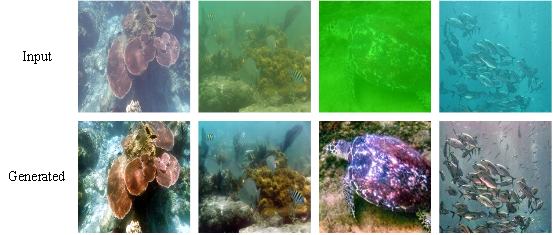
(3)fw-gan: underwater image enhancement using generative adversarial network with multi-scale fusion
针对水下机器人导航时面临的图像颜色失真、对比度低和可见度低等问题为生成器额外提供对应缓解以上问题的先验特征,基于对抗生成网络提出了水下图像融合增强网络模型,提出使用多尺度融合连接,通过注意力特征聚合使模型可以融合先验方法的优势进而预测出高质量的增强结果。在 linux 环境下使用pytorch实现了该方法并在公开数据集上验证了方法的优越性,性能领先于近三年发表在顶会顶刊的同类型工作。研究成果2022年8月发表在signal processing: image communication国际知名学术期刊上(中科院二区,if=3.453)。
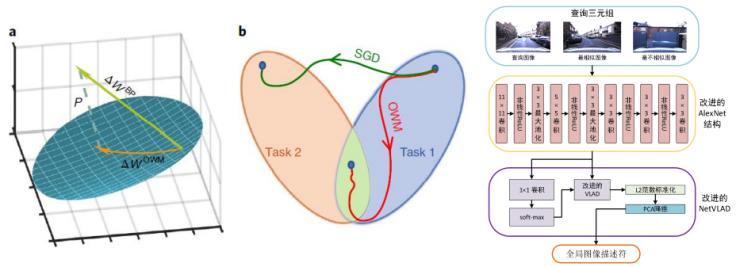
(4)cross-scene loop-closure detection with continual learning for visual slam
在解决大范围环境中机器人导航学习的灾难性遗忘问题方面,对slam特征学习的卷积层运算过程进行了优化设计,提出一种具有跨场景连续学习能力的鲁棒性回环检测方法,以有效增强slam的鲁棒性。该方法克服了视觉slam学习型回环检测方法的灾难性遗忘问题,使其具有了终生连续学习能力,同时还提出了一套可以评估视觉slam回环检测连续性学习能力的方法。与现有的slam方法相比,本方法使得slam拥有了明显的连续学习能力,对变化环境(包括:光照变化、场景内容变化等)具有更强的适应能力,该方法为服务机器人在更广的应用领域长时间大范围区域进行slam提供了有价值的应用依据。研究成果2021年发表在journal of advanced robotic systems期刊上(中科院四区,if=1.714)。

 308
308
 2
2
 0
0
 2022-09-13 22:11:10
2022-09-13 22:11:10
 2022-09-21
2022-09-21